SWARM DRONE: FURY VISION Autonomous Air Vehicle (AAV)

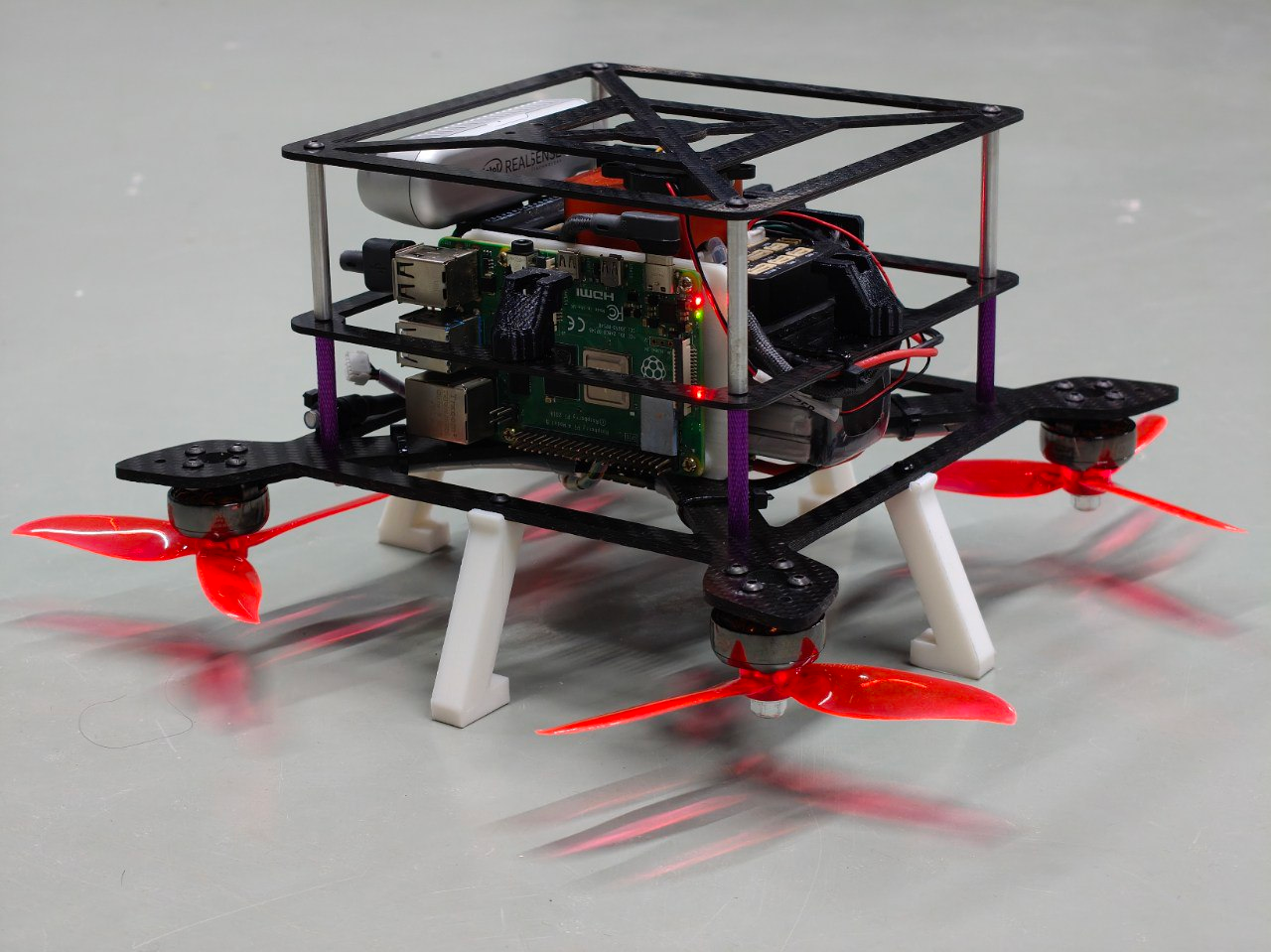
Overview: This project highlights the development of Fury, a high-performance, multi-mission Autonomous Air Vehicle (AAV) platform tailored for a wide range of aerial operations. The FuryVision AAV is a modified version of the original Fury, designed to accommodate four Intel RealSense cameras, significantly enhancing its visual and spatial sensing capabilities. Developed by the Open Drone Team at CDOH Lab, ICFOSS, Thiruvananthapuram, this version was specifically engineered based on the detailed requirements from IIT Kanpur. The integration of Intel RealSense cameras allows for advanced visual sensing, precise spatial mapping, and autonomous navigation, making FuryVision AAV a cutting-edge tool for various autonomous missions, including those involving real-time environmental awareness and navigation in complex terrains.
Hardware Requirements
- Flight Controller: Pixhawk Orange Cube+
- Motors: Emax Brushless Motor, 2306-2400KV
- GPS: Here 3+ GPS Module
- Cameras (FuryVision AAV): Intel RealSense D435i
- Battery: 14.8V, 2200mAh LiPo
- ESC: Holybro Tekko 4in1 50A
Conclusion : The FURY VISION AAV is a state-of-the-art autonomous aerial vehicle designed for versatility and performance across diverse missions. Featuring advanced sensors and components, the modified FuryVision AAV integrates Intel RealSense cameras for enhanced visual sensing, spatial mapping, and autonomous navigation. Developed by the Open Drone Team at CDOH Lab, ICFOSS, in collaboration with IIT Kanpur, the drone highlights the potential of open-source innovation to address challenges in research, disaster management, and other critical applications. Its modular, adaptable design ensures scalability and long-term utility, establishing it as a pioneering platform in modern drone technology.

